21 KiB
MindSpore Lite 端侧目标检测demo(Android)
本示例程序演示了如何在端侧利用MindSpore Lite C++ API(Android JNI)以及MindSpore Lite 目标检测模型完成端侧推理,实现对图库或者设备摄像头捕获的内容进行检测,并在App图像预览界面中显示连续目标检测结果。
运行依赖
- Android Studio >= 3.2 (推荐4.0以上版本)
- NDK 21.3
- CMake 3.10
- Android SDK >= 26
构建与运行
-
在Android Studio中加载本示例源码,并安装相应的SDK(指定SDK版本后,由Android Studio自动安装)。
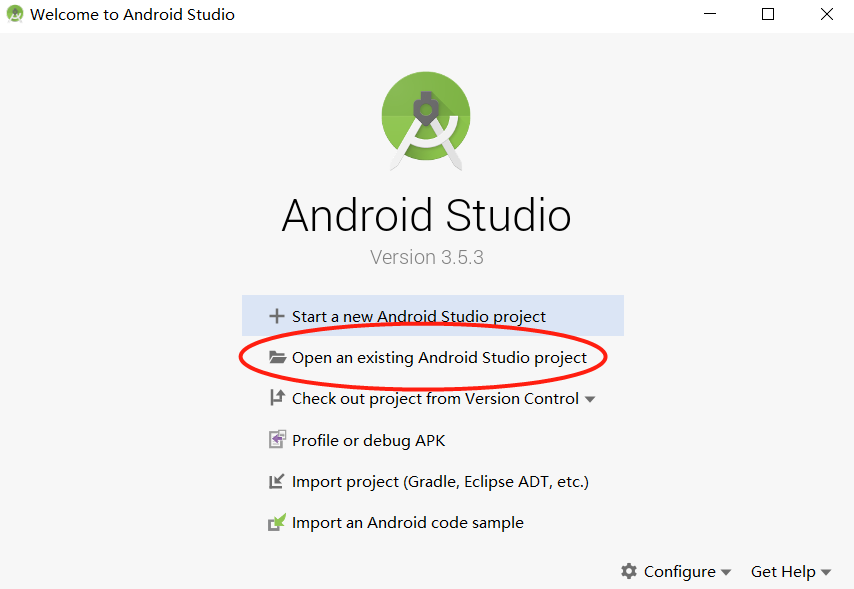
启动Android Studio后,点击
File->Settings->System Settings->Android SDK,勾选相应的SDK。如下图所示,勾选后,点击OK,Android Studio即可自动安装SDK。
(可选)若安装时出现NDK版本问题,可手动下载相应的NDK版本(本示例代码使用的NDK版本为21.3),并在
Project Structure的Android NDK location设置中指定SDK的位置。
-
连接Android设备,运行目标检测示例应用程序。
通过USB连接Android设备调试,点击
Run 'app'即可在你的设备上运行本示例项目。- 注:编译过程中Android Studio会自动下载MindSpore Lite、模型文件等相关依赖项,编译过程需做耐心等待。

Android Studio连接设备调试操作,可参考https://developer.android.com/studio/run/device?hl=zh-cn。
-
在Android设备上,点击“继续安装”,安装完即可查看到设备摄像头捕获的内容和推理结果。

如下图所示,检测出图中内容是鼠标。

示例程序详细说明
本端侧目标检测Android示例程序分为JAVA层和JNI层,其中,JAVA层主要通过Android Camera 2 API实现摄像头获取图像帧,以及相应的图像处理(针对推理结果画框)等功能;JNI层在Runtime中完成模型推理的过程。
此处详细说明示例程序的JNI层实现,JAVA层运用Android Camera 2 API实现开启设备摄像头以及图像帧处理等功能,需读者具备一定的Android开发基础知识。
示例程序结构
app
|
├── libs # 存放demo jni层编译出的库文件
│ └── arm64-v8a
│ │── libmlkit-label-MS.so #
|
├── src/main
│ ├── assets # 资源文件
| | └── ssd.ms # 存放模型文件
│ |
│ ├── cpp # 模型加载和预测主要逻辑封装类
| | ├── mindspore-lite-x.x.x-mindata-arm64-cpu # minspore源码编译出的调用包,包含demo jni层依赖的库文件及相关的头文件
| | | └── ...
│ | |
| | ├── MindSporeNetnative.cpp # MindSpore调用相关的JNI方法
│ ├── java # java层应用代码
│ │ └── com.huawei.himindsporedemo
│ │ ├── help # 图像处理及MindSpore JNI调用相关实现
│ │ │ └── ...
│ │ └── obejctdetect # 开启摄像头及绘制相关实现
│ │ └── ...
│ │
│ ├── res # 存放Android相关的资源文件
│ └── AndroidManifest.xml # Android配置文件
│
├── CMakeList.txt # cmake编译入口文件
│
├── build.gradle # 其他Android配置文件
├── download.gradle # APP构建时由gradle自动从HuaWei Server下载依赖的库文件及模型文件
└── ...
配置MindSpore Lite依赖项
Android JNI层调用MindSpore C++ API时,需要相关库文件支持。可通过MindSpore Lite源码编译生成mindspore-lite-{version}-minddata-{os}-{device}.tar.gz库文件包并解压缩(包含libmindspore-lite.so库文件和相关头文件),在本例中需使用生成带图像预处理模块的编译命令。
version:输出件版本号,与所编译的分支代码对应的版本一致。
device:当前分为cpu(内置CPU算子)和gpu(内置CPU和GPU算子)。
os:输出件应部署的操作系统。
本示例中,build过程由download.gradle文件自动下载MindSpore Lite 版本文件,并放置在app/src/main/cpp/目录下。
-
注:若自动下载失败,请手动下载相关库文件,解压并放在对应位置:
mindspore-lite-1.0.0-minddata-arm64-cpu.tar.gz 下载链接
在app的build.gradle文件中配置CMake编译支持,以及arm64-v8a的编译支持,如下所示:
android{
defaultConfig{
externalNativeBuild{
cmake{
arguments "-DANDROID_STL=c++_shared"
}
}
ndk{
abiFilters 'arm64-v8a'
}
}
}
在app/CMakeLists.txt文件中建立.so库文件链接,如下所示。
# Set MindSpore Lite Dependencies.
set(MINDSPORELITE_VERSION mindspore-lite-1.0.0-minddata-arm64-cpu)
include_directories(${CMAKE_SOURCE_DIR}/src/main/cpp/${MINDSPORELITE_VERSION})
add_library(mindspore-lite SHARED IMPORTED )
add_library(minddata-lite SHARED IMPORTED )
set_target_properties(mindspore-lite PROPERTIES IMPORTED_LOCATION
${CMAKE_SOURCE_DIR}/src/main/cpp/${MINDSPORELITE_VERSION}/lib/libmindspore-lite.so)
set_target_properties(minddata-lite PROPERTIES IMPORTED_LOCATION
${CMAKE_SOURCE_DIR}/src/main/cpp/${MINDSPORELITE_VERSION}/lib/libminddata-lite.so)
# Link target library.
target_link_libraries(
...
mindspore-lite
minddata-lite
...
)
下载及部署模型文件
从MindSpore Model Hub中下载模型文件,本示例程序中使用的目标检测模型文件为ssd.ms,同样通过download.gradle脚本在APP构建时自动下载,并放置在app/src/main/assets工程目录下。
- 注:若下载失败请手动下载模型文件,ssd.ms 下载链接。
编写端侧推理代码
在JNI层调用MindSpore Lite C++ API实现端测推理。
推理代码流程如下,完整代码请参见src/cpp/MindSporeNetnative.cpp。
-
加载MindSpore Lite模型文件,构建上下文、会话以及用于推理的计算图。
-
加载模型文件:创建并配置用于模型推理的上下文
// Buffer is the model data passed in by the Java layer jlong bufferLen = env->GetDirectBufferCapacity(buffer); char *modelBuffer = CreateLocalModelBuffer(env, buffer); -
创建会话
void **labelEnv = new void *; MSNetWork *labelNet = new MSNetWork; *labelEnv = labelNet; // Create context. lite::Context *context = new lite::Context; context->cpu_bind_mode_ = lite::NO_BIND; context->device_ctx_.type = lite::DT_CPU; context->thread_num_ = numThread; //Specify the number of threads to run inference // Create the mindspore session. labelNet->CreateSessionMS(modelBuffer, bufferLen, "device label", context); delete context; -
加载模型文件并构建用于推理的计算图
void MSNetWork::CreateSessionMS(char* modelBuffer, size_t bufferLen, std::string name, mindspore::lite::Context* ctx) { CreateSession(modelBuffer, bufferLen, ctx); session = mindspore::session::LiteSession::CreateSession(ctx); auto model = mindspore::lite::Model::Import(modelBuffer, bufferLen); int ret = session->CompileGraph(model); // Compile Graph }
-
-
将输入图片转换为传入MindSpore模型的Tensor格式。
将待检测图片数据转换为输入MindSpore模型的Tensor。
// Convert the Bitmap image passed in from the JAVA layer to Mat for OpenCV processing LiteMat lite_mat_bgr,lite_norm_mat_cut; if (!BitmapToLiteMat(env, srcBitmap, lite_mat_bgr)){ MS_PRINT("BitmapToLiteMat error"); return NULL; } int srcImageWidth = lite_mat_bgr.width_; int srcImageHeight = lite_mat_bgr.height_; if(!PreProcessImageData(lite_mat_bgr, lite_norm_mat_cut)){ MS_PRINT("PreProcessImageData error"); return NULL; } ImgDims inputDims; inputDims.channel =lite_norm_mat_cut.channel_; inputDims.width = lite_norm_mat_cut.width_; inputDims.height = lite_norm_mat_cut.height_; // Get the mindsore inference environment which created in loadModel(). void **labelEnv = reinterpret_cast<void **>(netEnv); if (labelEnv == nullptr) { MS_PRINT("MindSpore error, labelEnv is a nullptr."); return NULL; } MSNetWork *labelNet = static_cast<MSNetWork *>(*labelEnv); auto mSession = labelNet->session; if (mSession == nullptr) { MS_PRINT("MindSpore error, Session is a nullptr."); return NULL; } MS_PRINT("MindSpore get session."); auto msInputs = mSession->GetInputs(); auto inTensor = msInputs.front(); float *dataHWC = reinterpret_cast<float *>(lite_norm_mat_cut.data_ptr_); // copy input Tensor memcpy(inTensor->MutableData(), dataHWC, inputDims.channel * inputDims.width * inputDims.height * sizeof(float)); delete[] (dataHWC); -
进行模型推理前,输入tensor格式为 NHWC,shape为1:300:300:3,格式为RGB, 并对输入tensor做标准化处理.
bool PreProcessImageData(LiteMat &lite_mat_bgr,LiteMat &lite_norm_mat_cut) { bool ret=false; LiteMat lite_mat_resize; ret = ResizeBilinear(lite_mat_bgr, lite_mat_resize, 300, 300); if (!ret) { MS_PRINT("ResizeBilinear error"); return false; } LiteMat lite_mat_convert_float; ret = ConvertTo(lite_mat_resize, lite_mat_convert_float, 1.0 / 255.0); if (!ret) { MS_PRINT("ConvertTo error"); return false; } float means[3] = {0.485, 0.456, 0.406}; float vars[3] = {1.0 / 0.229, 1.0 / 0.224, 1.0 / 0.225}; SubStractMeanNormalize(lite_mat_convert_float, lite_norm_mat_cut, means, vars); return true; } -
对输入Tensor按照模型进行推理,获取输出Tensor,并进行后处理。
-
图执行,端测推理。
// After the model and image tensor data is loaded, run inference. auto status = mSession->RunGraph(); -
获取输出数据。
auto names = mSession->GetOutputTensorNames(); typedef std::unordered_map<std::string, std::vector<mindspore::tensor::MSTensor *>> Msout; std::unordered_map<std::string, mindspore::tensor::MSTensor *> msOutputs; for (const auto &name : names) { auto temp_dat =mSession->GetOutputByTensorName(name); msOutputs.insert(std::pair<std::string, mindspore::tensor::MSTensor *> {name, temp_dat}); } std::string retStr = ProcessRunnetResult(msOutputs, ret); -
模型有2个输出,输出1是目标的类别置信度,维度为1:1917: 81; 输出2是目标的矩形框坐标偏移量,维度为1:1917:4。 为了得出目标的实际矩形框,需要根据偏移量计算出矩形框的位置。这部分在 getDefaultBoxes中实现。
void SSDModelUtil::getDefaultBoxes() { float fk[6] = {0.0, 0.0, 0.0, 0.0, 0.0, 0.0}; std::vector<struct WHBox> all_sizes; struct Product mProductData[19 * 19] = {0}; for (int i = 0; i < 6; i++) { fk[i] = config.model_input_height / config.steps[i]; } float scale_rate = (config.max_scale - config.min_scale) / (sizeof(config.num_default) / sizeof(int) - 1); float scales[7] = {0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0}; for (int i = 0; i < sizeof(config.num_default) / sizeof(int); i++) { scales[i] = config.min_scale + scale_rate * i; } for (int idex = 0; idex < sizeof(config.feature_size) / sizeof(int); idex++) { float sk1 = scales[idex]; float sk2 = scales[idex + 1]; float sk3 = sqrt(sk1 * sk2); struct WHBox tempWHBox; all_sizes.clear(); if (idex == 0) { float w = sk1 * sqrt(2); float h = sk1 / sqrt(2); tempWHBox.boxw = 0.1; tempWHBox.boxh = 0.1; all_sizes.push_back(tempWHBox); tempWHBox.boxw = w; tempWHBox.boxh = h; all_sizes.push_back(tempWHBox); tempWHBox.boxw = h; tempWHBox.boxh = w; all_sizes.push_back(tempWHBox); } else { tempWHBox.boxw = sk1; tempWHBox.boxh = sk1; all_sizes.push_back(tempWHBox); for (int j = 0; j < sizeof(config.aspect_ratios[idex]) / sizeof(int); j++) { float w = sk1 * sqrt(config.aspect_ratios[idex][j]); float h = sk1 / sqrt(config.aspect_ratios[idex][j]); tempWHBox.boxw = w; tempWHBox.boxh = h; all_sizes.push_back(tempWHBox); tempWHBox.boxw = h; tempWHBox.boxh = w; all_sizes.push_back(tempWHBox); } tempWHBox.boxw = sk3; tempWHBox.boxh = sk3; all_sizes.push_back(tempWHBox); } for (int i = 0; i < config.feature_size[idex]; i++) { for (int j = 0; j < config.feature_size[idex]; j++) { mProductData[i * config.feature_size[idex] + j].x = i; mProductData[i * config.feature_size[idex] + j].y = j; } } int productLen = config.feature_size[idex] * config.feature_size[idex]; for (int i = 0; i < productLen; i++) { for (int j = 0; j < all_sizes.size(); j++) { struct NormalBox tempBox; float cx = (mProductData[i].y + 0.5) / fk[idex]; float cy = (mProductData[i].x + 0.5) / fk[idex]; tempBox.y = cy; tempBox.x = cx; tempBox.h = all_sizes[j].boxh; tempBox.w = all_sizes[j].boxw; mDefaultBoxes.push_back(tempBox); } } } } -
通过最大值抑制将目标类型置信度较高的输出筛选出来。
void SSDModelUtil::nonMaximumSuppression(const YXBoxes *const decoded_boxes, const float *const scores, const std::vector<int> &in_indexes, std::vector<int> &out_indexes, const float nmsThreshold, const int count, const int max_results) { int nR = 0; //number of results std::vector<bool> del(count, false); for (size_t i = 0; i < in_indexes.size(); i++) { if (!del[in_indexes[i]]) { out_indexes.push_back(in_indexes[i]); if (++nR == max_results) { break; } for (size_t j = i + 1; j < in_indexes.size(); j++) { const auto boxi = decoded_boxes[in_indexes[i]], boxj = decoded_boxes[in_indexes[j]]; float a[4] = {boxi.xmin, boxi.ymin, boxi.xmax, boxi.ymax}; float b[4] = {boxj.xmin, boxj.ymin, boxj.xmax, boxj.ymax}; if (IOU(a, b) > nmsThreshold) { del[in_indexes[j]] = true; } } } } } -
对每类的概率大于阈值,通过NMS算法筛选出矩形框后, 还需要将输出的矩形框恢复到原图尺寸。
std::string SSDModelUtil::getDecodeResult(float *branchScores, float *branchBoxData) { std::string result = ""; NormalBox tmpBox[1917] = {0}; float mScores[1917][81] = {0}; float outBuff[1917][7] = {0}; float scoreWithOneClass[1917] = {0}; int outBoxNum = 0; YXBoxes decodedBoxes[1917] = {0}; // Copy branch outputs box data to tmpBox. for (int i = 0; i < 1917; ++i) { tmpBox[i].y = branchBoxData[i * 4 + 0]; tmpBox[i].x = branchBoxData[i * 4 + 1]; tmpBox[i].h = branchBoxData[i * 4 + 2]; tmpBox[i].w = branchBoxData[i * 4 + 3]; } // Copy branch outputs score to mScores. for (int i = 0; i < 1917; ++i) { for (int j = 0; j < 81; ++j) { mScores[i][j] = branchScores[i * 81 + j]; } } ssd_boxes_decode(tmpBox, decodedBoxes); const float nms_threshold = 0.3; for (int i = 1; i < 81; i++) { std::vector<int> in_indexes; for (int j = 0; j < 1917; j++) { scoreWithOneClass[j] = mScores[j][i]; // if (mScores[j][i] > 0.1) { if (mScores[j][i] > g_thres_map[i]) { in_indexes.push_back(j); } } if (in_indexes.size() == 0) { continue; } sort(in_indexes.begin(), in_indexes.end(), [&](int a, int b) { return scoreWithOneClass[a] > scoreWithOneClass[b]; }); std::vector<int> out_indexes; nonMaximumSuppression(decodedBoxes, scoreWithOneClass, in_indexes, out_indexes, nms_threshold); for (int k = 0; k < out_indexes.size(); k++) { outBuff[outBoxNum][0] = out_indexes[k]; //image id outBuff[outBoxNum][1] = i; //labelid outBuff[outBoxNum][2] = scoreWithOneClass[out_indexes[k]]; //scores outBuff[outBoxNum][3] = decodedBoxes[out_indexes[k]].xmin * inputImageWidth / 300; outBuff[outBoxNum][4] = decodedBoxes[out_indexes[k]].ymin * inputImageHeight / 300; outBuff[outBoxNum][5] = decodedBoxes[out_indexes[k]].xmax * inputImageWidth / 300; outBuff[outBoxNum][6] = decodedBoxes[out_indexes[k]].ymax * inputImageHeight / 300; outBoxNum++; } } MS_PRINT("outBoxNum %d", outBoxNum); for (int i = 0; i < outBoxNum; ++i) { std::string tmpid_str = std::to_string(outBuff[i][0]); result += tmpid_str; // image ID result += "_"; // tmpid_str = std::to_string(outBuff[i][1]); MS_PRINT("label_classes i %d, outBuff %d",i, (int) outBuff[i][1]); tmpid_str = label_classes[(int) outBuff[i][1]]; result += tmpid_str; // label id result += "_"; tmpid_str = std::to_string(outBuff[i][2]); result += tmpid_str; // scores result += "_"; tmpid_str = std::to_string(outBuff[i][3]); result += tmpid_str; // xmin result += "_"; tmpid_str = std::to_string(outBuff[i][4]); result += tmpid_str; // ymin result += "_"; tmpid_str = std::to_string(outBuff[i][5]); result += tmpid_str; // xmax result += "_"; tmpid_str = std::to_string(outBuff[i][6]); result += tmpid_str; // ymax result += ";"; } return result; }
-